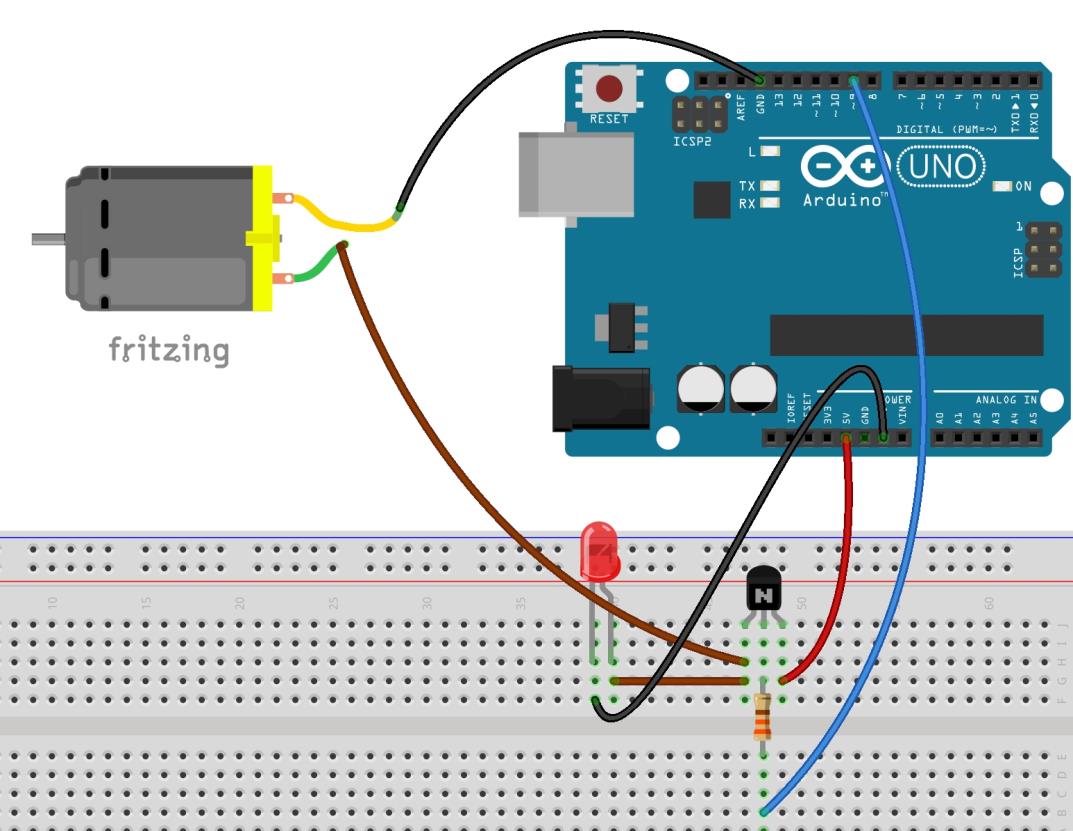
Se realizó en tinker cad la conexión de el moto reductor. En esta conecté los circuitos como aparece en la imágen superior.
Para esta conexión se necesitó lo siguiente:
-Protoboard
- Motoreductor
-Arduino UNO
-Cables jumper
-Resistencias
-Transistor NPN
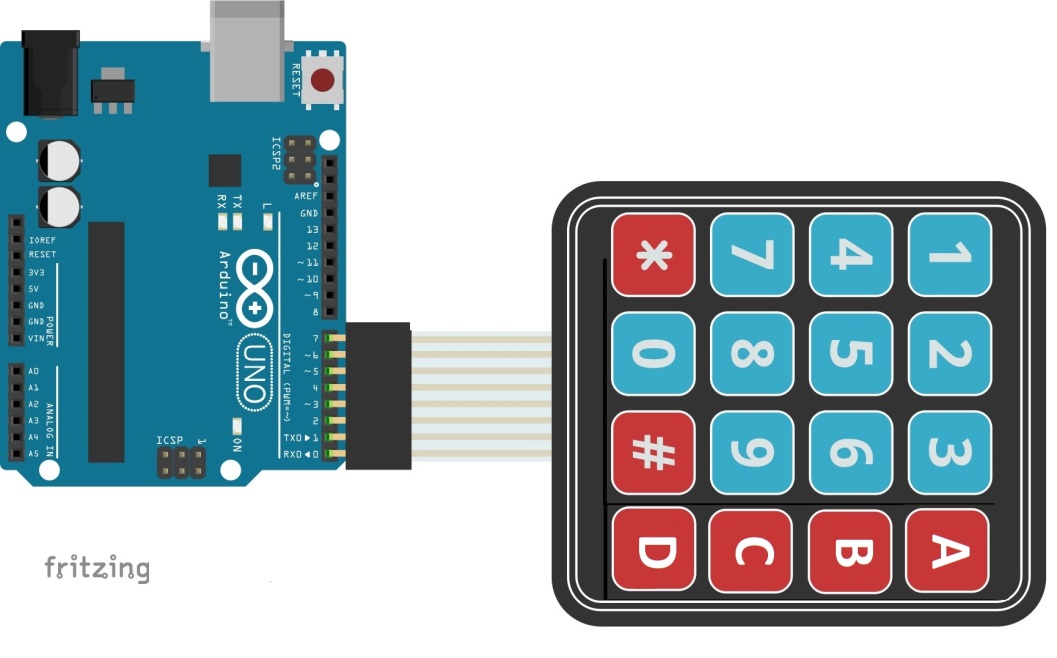
Obviamente se necesitó formar un código que controle el funcionamiento del circuito.
#include <Keypad.h>
const byte Filas = 4; //Cuatro filas
const byte Cols = 4; //Cuatro columnas
byte Pins_Filas[] = {12, 11, 10,8}; //Pines Arduino a los que contamos las filas.
byte Pins_Cols[] = { 7, 6, 5, 4}; // Pines Arduino a los que contamos las columnas.
char Teclas [ Filas ][ Cols ] =
{
{'1','2','3','A'},
{'4','5','6','B'},
{'7','8','9','C'},
{'*','0','#','D'}
};
Keypad Teclado1 = Keypad(makeKeymap(Teclas), Pins_Filas, Pins_Cols, Filas, Cols);
const int control = 9 ;
int n = 0 ;
void setup()
{ pinMode(control, OUTPUT) ;
Serial.begin(9600) ;}
void loop()
{
analogWrite (control, n) ;
char pulsacion = Teclado1.getKey() ;
Serial.println(pulsacion);
if (pulsacion !=0){
if(pulsacion=='A')
{n=130;}
if(pulsacion=='B')
{n=255;}
if(pulsacion=='C')
{n=0;}}
}
3. En base a lo observado, infiera acerca de la función del código.
La función de este código es modificar la velocidad del movimiento rotatorio de el motor según la tecla que sea presionada en el teclado.
4. ¿Para qué sirve el transistor NPN?
El transistor de unión bipolar (del inglés bipolar junction transistor,
o sus siglas BJT) es un dispositivo electrónico de estado sólido
consistente en dos uniones PN muy cercanas entre sí, que permite
aumentar la corriente y disminuir el voltaje, además de controlar el
paso de la corriente a través de sus terminales.