UNIDAD EDUCATIVA PARTICULAR “POLITÉCNICO”
4° AÑO PAI - 10° AÑO DE
BÁSICA “C”
Tarea#
1:Sensor de Temperatura y Humedad
Nombre: Estefano Viteri Fecha:
26/07/17
El
DHT11 es un sensor que proporciona una salida de datos digital. Entre sus
ventajas podemos mencionar el bajo coste y el despliegue de datos digitales.
Esto supone una gran ventaja frente a los sensores del tipo análogo, como el
LM335 por ejemplo, en los cuales las fluctuaciones en el voltaje alteran la
lectura de datos.
Entre
las desventajas pues, el DHT11 solo lee enteros, no podemos leer temperaturas
con decimales por lo que tenemos que pensarlo muy bien a la hora de utilizar
este sensor para trabajos en los que se requieran lecturas precisas de
temperatura y/o humedad. En fin, vamos a lo que vamos. Para poder leer datos
desde este sensor de una forma sencilla necesitamos descargar una librería que
ha sido escrita para este propósito.
Las características del DHT11 son:
·
Muy barato, sobre 2€
·
Funciona con 3,3 y 5V de alimentación
·
Rango de temperatura: de 0º a 50º con 5%
de precisión (pero solo mide por grados, no fracciones)
·
Rango de humedad: de 20% al 80% con 5%
de precisión
·
1 Muestra por segundo (No es el más
rápido del oeste)
·
Bajo consumo
·
Devuelva la medida en ºC
El
sensor incluye un sentido resistivo de componentes húmedos y un dispositivo de
medición de temperatura NTC, y conectado con un microcontrolador de alto
rendimiento de 8 bits.
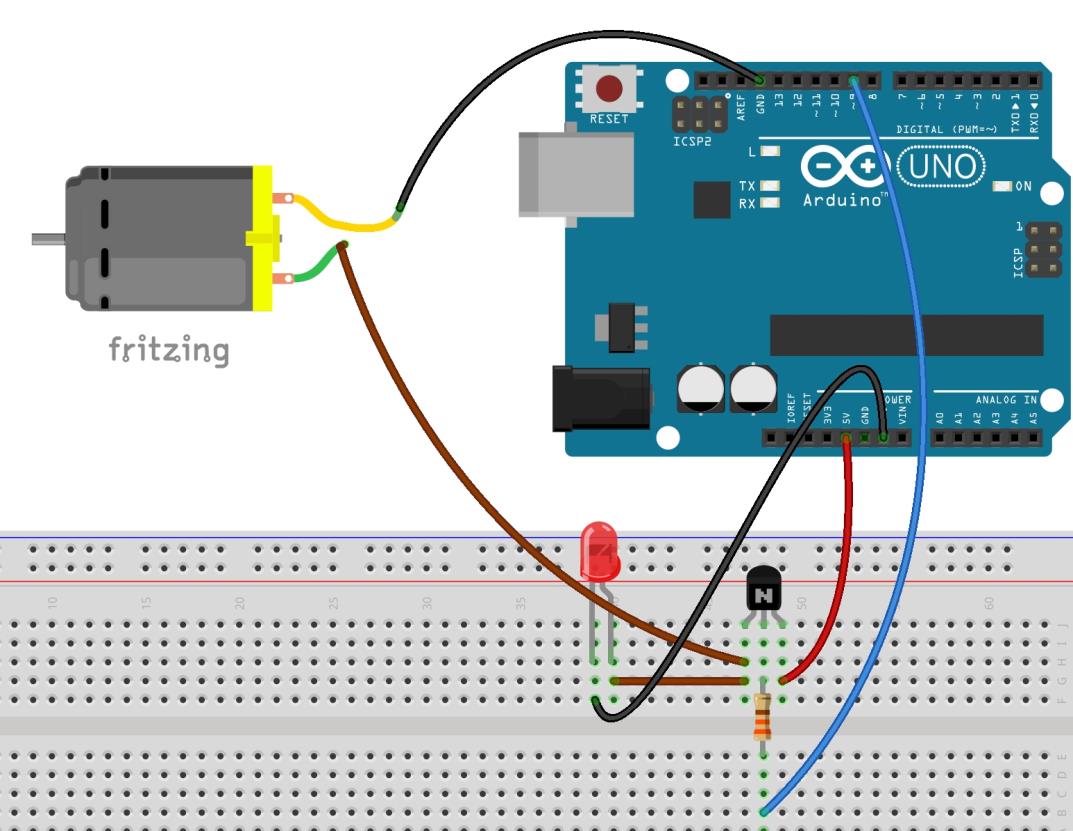
El
DHT11 tiene tres líneas : GND, +5 y una sola línea de datos. Los valores
tomados por el sensor son transmitidos por medio de la línea de valores (S).
Para
realizar la conexión, primero conecté el sensor al protoboard. Conecté un
jumper en frente de la pata positiva y lo conecté al Arduino en el pin 5v.
Luego
conecté un jumper frente a la pata “S” y lo conecté al pin 4 del Arduino.
Finalmente, conecté un jumper en frente a la pata negativa del sensor y a su
vez lo conecté al pin “gnd” de la placa Arduino.
Para
finalizar la conexión, abrí el programa del sensor en la aplicación del
Arduino, seleccioné la placa, añadí la librería ZIP, subí el programa al
Arduino y abrí el monitor serial para observar la humedad y temperatura
captadas por el sensor.